|
|
市場調査レポート
商品コード
1337770
中国の自動運転データクローズドループ調査レポート、2023年China Autonomous Driving Data Closed Loop Research Report, 2023 |
||||||
|
|
|||||||
|
|||||||
| 中国の自動運転データクローズドループ調査レポート、2023年 |
|
出版日: 2023年08月05日
発行: ResearchInChina
ページ情報: 英文 318 Pages
納期: 即日から翌営業日
|
- 全表示
- 概要
- 目次
現在、自動運転は3.0の段階に入っています。人工的なルールに基づくソフトウェア主導のステージ2.0とは異なり、ステージ3.0では、自動運転機能の反復はビッグデータと基礎モデルによって推進され、知覚モードはマルチモーダルセンサーが共同で結果を出力し、情報融合モードはポスト融合からイン融合、プレ融合へと進化します。
データ能力構築に関しては、企業はデータクローズドループの効率とコストに重点を移し、データコンプライアンスとデータセキュリティを前提に、より多くのコーナーケース(交通事故、悪天候、複雑な道路状況などの極端なケース)に対応できるようになっています。ここでOEMは、市街地、都市部の陸橋、高速道路などのシナリオにおける自動運転の適用を改善することに力を注いでいます。
高速道路のシナリオでは、ユーザーは安全に自動運転機能を有効にすることができます。自動運転システムは、正確で快適なオンランプとオフランプのガイドを提供し、車線内の車両の中心を維持し、車両が高速で急コーナーを曲がることを可能にし、混雑した道路区間での追従と停止のバランスをとり、最適な車線をインテリジェントに選択し、車線内の遅い車両を水平に回避して追い越し、事故や遅い車両をインテリジェントに認識して回避します。例えば、Pony.aiのNOAソリューション(下図参照)は、高速道路や市街地の交通シナリオに柔軟に対応し、自動車線変更、オン/オフランプ、クルーズコントロール、車線中央維持、障害物回避などのシナリオで優れた性能を発揮します。
都市部のシナリオでは、NIO NOP+、Huawei NCA、Xpeng XNGPなどの都市型NOA機能が登場し、車両機能のシナリオ汎化能力が向上しています。例えば、Avatrに搭載されたファーウェイのインテリジェントドライビングシステムADS2.0は、都市部の狭い道路で2台のトラックの間をうまく通過することを可能にし(下図参照)、意思決定において人間に匹敵するか、凌駕しています。
つまり、自動運転システムは、自動車線変更や障害物回避などの場面でこれまで以上に優れた性能を発揮し、 促進要因が車両をコントロールする頻度を減らしているのです。車両の競合情報の背景には、車両とクラウドのクローズドループにおける効率的なデータの流れがあります。例えば、Baidu AI Cloudの自動運転データクローズドループソリューションは、全サイクルの自動運転データ操作サービスや、データ収集、処理、利用のプロセスにおける問題を解決する自動運転ツールチェーンプラットフォームを提供します。
当レポートでは、中国の自動運転データクローズドループ市場について調査し、市場の概要とともに、基礎モデルおよびプラットフォームの適用動向、および市場に参入する各サプライヤーのプロファイルなどを提供しています。
目次
第1章 自動運転データクローズドループの概要
- 自動運転技術開発の3つの柱
- データクローズドループとは
第2章 自動運転データクローズドループにおける基礎モデルの適用
- ニューラルネットワークに基づく基礎モデル
- 融合後、機能レベルの融合、および融合前
- 現在ではBEV+変圧器が主流のソリューションとなっている
- 自動運転を実現する基盤モデルの概要
- 基礎モデルの機能構築とツールチェーン
- 自動車産業における基礎モデルのレイアウトの概要
- AI基盤モデルが自動車GPTを加速
- AI基盤モデルが都市NOAの実装を加速
第3章 自動運転データクローズドループにおけるクラウドプラットフォームの適用
- データクローズドループにおけるクラウドプラットフォームの役割
- 中国の自動運転クラウドスーパーコンピューティングセンター一覧
- 通常:AWSクラウドプラットフォームデータクローズドループ
- 典型的:Volcengineデータクローズドループクラウドサービスプラットフォーム
- 典型的:Alibaba Cloudデータクローズドループ
第4章 自動運転データクローズドループにおける代表的なシミュレーション会社
- 自動運転シミュレーション国際標準化機構
- 中国におけるASAM標準のローカライズ
- ASAM標準のドメイン
- 外国の車両ダイナミクスベンチマーク企業
- 海外の交通シーンシミュレーションのベンチマーク企業
- 海外の仮想シーンシミュレーションベンチマーク企業
- 海外のセンサーシミュレーションベンチマーク企業
- 海外のハードウェアインザループシミュレーションベンチマーク企業
- 中国における自動運転シミュレーションプラットフォームの動向
- 代表的な企業:IAE
- 代表的な会社:PanoSim
- 代表的な企業:51WORLD
- 代表的な企業:Cognata
- 代表的な企業:VI-grade
第5章 代表的なOEMのデータクローズドループレイアウト
- BYD
- SAIC
- Changan Automobile
- Geely
- Xpeng
- Li Auto
- Tesla
第6章 代表的な自動運転プロバイダーのデータクローズドループレイアウト
- Baidu
- Huawei
- Freetech
- MAXIEYE
- Nullmax
- Pony.ai
- Momenta
第7章 代表的なデータクローズドループソリューションプロバイダー
- Haomo.ai
- SenseTime
- EXCEEDDATA
- LiangDao Intelligence
- JueFX Technology
- Rhino
- Horizon Robotics
- Black Sesame Technologies
- Kunyi Electronics
Data closed loop research: in the stage of Autonomous Driving 3.0, work hard on end-to-end development to control data.
At present, autonomous driving has entered the stage 3.0. Differing from the software-driven stage 2.0 based on artificial rules, in the stage 3.0, the iteration of autonomous driving functions is driven by big data and foundation models; the perception mode is that multimodal sensors jointly output the results, while the information fusion mode evolves from post-fusion to in-fusion and pre-fusion.
As concerns data capability building, companies have shifted their focus to the efficiency and cost of the data closed loop, and can cope with more Corner Cases (extreme cases, e.g., traffic accidents, severe weathers or complex road conditions) on the premise of data compliance and data security, so as to expedite the development of user experience from "fatigue relief" to "scenario-based comfortable experience". Wherein, OEMs concentrate their efforts on improving application of autonomous driving in such scenario as city areas, urban overpasses and highways.
In highway scenarios, users can securely enable autonomous driving functions. The autonomous driving system provides a guide for accurate and comfortable on-ramp and off-ramp, keeps vehicles centering in lanes, allows vehicles to come around sharp corners at high speeds, balances follow and stop on congested road sections, intelligently selects the best lane, horizontally avoids and overtakes slow vehicles in lanes, and intelligently recognizes and avoids accidents and slow vehicles. For example, Pony.ai's NOA solution (see the figure below) makes a flexible response to highway and urban traffic scenarios, and performs well in such scenarios as automatic lane change, on/off-ramp, cruise control, lane centering, and obstacle avoidance.

In urban scenarios, city NOA functions like NIO NOP+, Huawei NCA, and Xpeng XNGP have come into service, with the improving scenario generalization capabilities for vehicle functions. For example, Huawei's intelligent driving system ADS2.0 mounted on Avatr allows the car to successfully pass through between the two trucks on a narrow urban street (see the figure below), and rivals or even outperforms humans in making decisions.

In short, the autonomous driving system performs ever better in automatic lane change, obstacle avoidance and other scenarios, and lets drivers take control of vehicles less frequently. Behind the vehicle intelligence competition is the efficient flow of data in the vehicle-cloud closed loop. Examples include Baidu AI Cloud's autonomous driving data closed loop solution that provides full-cycle autonomous driving data operation services and an autonomous driving tool chain platform to solve problems in the process of data collection, processing, and use.
1. The stage of data-driven Autonomous Driving 3.0 starts, and companies double down on building or improving all the links of their data closed loop system.
The essence of the Autonomous Driving 3.0 is to be driven by data for ever higher data mining efficiency and date utilization. In this stage, the scale of vehicle test data can cover more than 100 million kilometers, which poses challenges to the collection, annotation and other links in the data closed loop. In this regard, automakers raise the efficiency of data processing by way of improving the flexible collection logic of the shadow mode and simulating zero prototypes to gear up for algorithm iteration, model training and deployment.
Let's look at automakers' measures to improve efficiency from the following key links of data closed loop, i.e., data collection, data annotation, and simulation test.
Data collection
At present, data can be collected by road collection vehicles, production vehicles, cloud simulation, and vehicle owner contribution. Wherein, the shadow mode works relatively more efficiently when collecting dynamic/static data inside and outside the vehicle. The algorithm trigger logic set by automakers is more flexible and precise. For example, Xpeng sets more than 300 trigger signals on vehicles with the ability to collect data, and the system can judge which corner case is useful at present and then uploads it. SAIC Rising Auto sets up multiple Triggered Events in cars to collect and return multimodal data after triggering these conditions, having enabled backhaul of nearly 12 million clips of data just within three months. In addition, EXCEEDDATA's data collection system uses the cloud low-level code tool vStudio and various operators, making it easy to build trigger algorithms. The complete vehicle-cloud cooperative solution allows for one-click distribution of trigger algorithms to vehicles, without needing a complicated OTA process, delivering high algorithm iteration efficiency. EXCEEDDATA's shadow mode is evolving to the stage 2.0, helping to build a trigger scene library and enable human-computer comparison and AB model comparison, and the edge computing assists in mining unknown abnormal scenarios for far lower cost and much higher efficiency.
Data annotation
Data annotation is one of the most critical links in the autonomous driving data closed loop. At present, how to keep improving the efficient automatic annotation of collected multimodal high-value data is the focus of conventional annotation companies and data closed loop solution providers.
To better empower automakers, conventional annotation companies are developing their own automated data annotation platforms to improve the efficiency and quality of data annotation. Meanwhile, they have also begun to partner with various intelligent computing centers, and use foundation models for ever greater capabilities of annotation platforms and lower cost of annotation.
In DataOcean AI's case, its self-developed autonomous driving annotation platform DOTS-AD can support multi-dimensional, all-round autonomous driving annotation tasks, with up to 8 times higher data annotation efficiency. Another example is the MindFlow SEED data service platform which drives the mass annotation of autonomous driving data via AI+RPA, increases the comprehensive labor efficiency by an average of 30% and lowers the data production cost by an average of 40%.
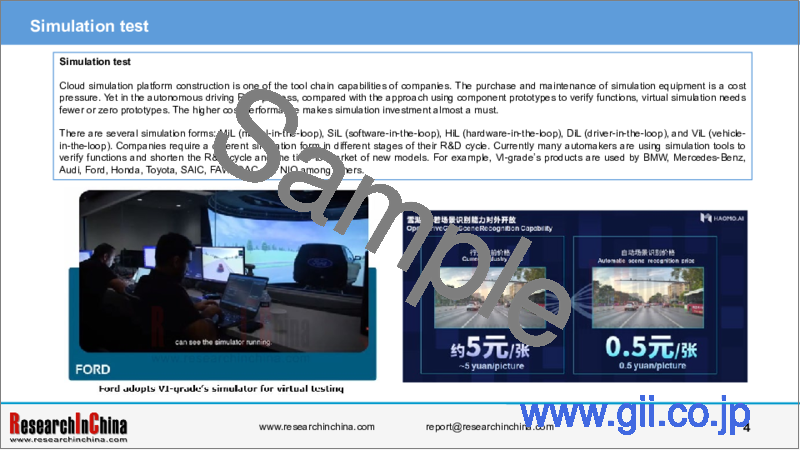
In terms of driving scene recognition capabilities, the Haomo DriveGPT-based 4D Clips driving scene recognition solution built by Haomo.ai, a data closed loop solution provider, can cut down the annotation cost of a single picture to 0.5 yuan, a tenth of the current industry average cost. Haomo.ai is opening up the image frame and 4D Clips automatic driving scene recognition service to the industry. At present, quite a few annotation companies have joined hands with Haomo.ai, including Datatang, DataOcean AI, Appen, Testin and Stardust AI. The win-win cooperation between companies is bound to slash the data use cost for the industry and improve data quality.

Simulation test
Cloud simulation platform construction is one of the tool chain capabilities of companies. The purchase and maintenance of simulation equipment is a cost pressure. Yet in the autonomous driving R&D process, compared with the approach using component prototypes to verify functions, virtual simulation needs fewer or zero prototypes. The higher cost performance makes simulation investment almost a must.
There are several simulation forms: MiL (model-in-the-loop), SiL (software-in-the-loop), HiL (hardware-in-the-loop), DiL (driver-in-the-loop), and ViL (vehicle-in-the-loop). Companies require a different simulation form in different stages of their R&D cycle. Currently many automakers are using simulation tools to verify functions and shorten the R&D cycle and the time-to-market of new models. For example, VI-grade's products are used by BMW, Mercedes-Benz, Audi, Ford, Honda, Toyota, SAIC, FAW, GAC and NIO among others.
2. When constructing a data closed loop ecosystem, companies quicken their pace of building "digital intelligence/data base" capabilities.
Data, algorithm, and computing power are the three cornerstones of autonomous driving technology. The volume and quality of data determine the upper limit of algorithm capabilities, and computing power is the carrier of data processing. The integration of software and hardware means the "smoothness" of adaptability between algorithms and domain controller/chip. Currently just a few companies like Tesla in the industry have built a complete intelligent ecosystem of "data + algorithm + computing power", and take 100% control of data. To have control over data, OEMs and software algorithm companies are running after them.
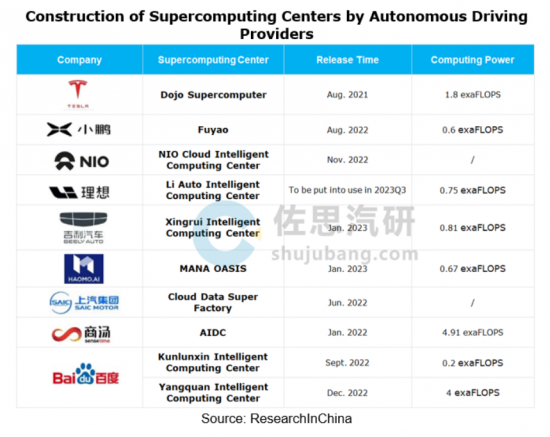
Build intelligent computing centers
As the initial investment in supercomputing centers is relatively high, OEMs and Tier 1 suppliers generally budget over RMB100 million for building AI computing centers. In the case of Dojo, Tesla's supercomputer platform that was put into use in July 2023, Tesla will invest more than USD1 billion in Dojo in 2024 to facilitate training of the supercomputer and neural networks.
Even so, automakers or technology providers with a long-term plan for autonomous driving are building their own supercomputing centers to hold stable computing resources and shorten the development cycle and the time-to-market of autonomous driving products. One example is "Fuyao", Xpeng's autonomous driving AI intelligent computing center co-funded with Alibaba in August 2022. The center can speed up the model training of autonomous driving algorithms by 170 times, and has the scope to increase computing power by 10 to 100 times in the future.
"Digital intelligence/data base" capability building
The full life cycle of intelligent vehicles needs to be driven by data, and it is the data-based vehicle-cloud full-link capability base that some autonomous driving solution providers work hard to build. For example, ExceedData's vehicle-cloud integrated computing architecture combines with its vehicle high-performance time-series database to build a data base for intelligent vehicles, and redefines the cost and efficiency of vehicle data intelligence, enabling an 85% reduction in the total cost. The data base solution has been well accepted by first-tier automakers including FAW, SAIC, SAIC Z-ONE, Human Horizons, Dongfeng Voyah, BAIC and Geely, and has been mass-produced and designated for more than 10 vehicle models.

Freetech has the ability to develop, mass-produce and deliver software and hardware integrated platforms, and has built a data closed loop link of "large-scale data collection - data processing system - automated iteration". Freetech's ODIN intelligent driving digital intelligence base supports large-scale mass production data closed loop system, and is composed of Freetech's large-scale mass production data base and the computing power platform deployed at the National Super Computing Center. Freetech has built a complete data closed loop system that supports algorithm evolution, and can complete the iterative evolution of perception algorithms, and the closed-loop verification of planning and control algorithms. The ODIN digital intelligence base is composed of self-developed domain controller, sensor, autonomous driving algorithm, and data closed loop system as the four pillar systems, having cooperated with more than 40 auto brands on over 100 model projects.
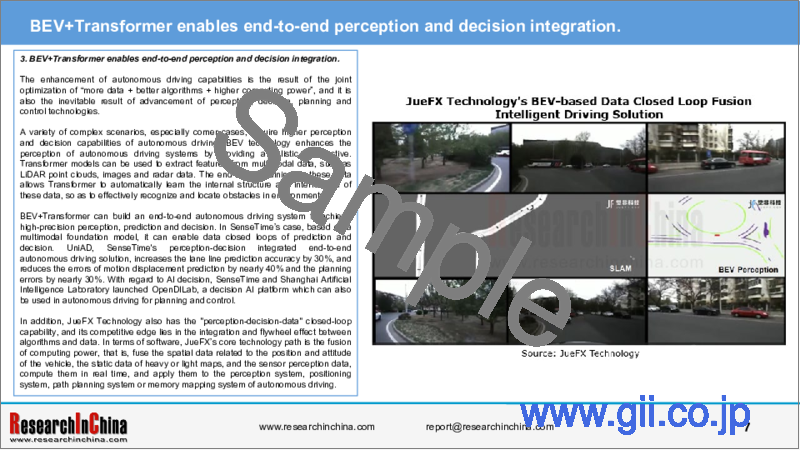
3. BEV+Transformer enables end-to-end perception and decision integration.
The enhancement of autonomous driving capabilities is the result of the joint optimization of "more data + better algorithms + higher computing power", and it is also the inevitable result of advancement of perception, decision, planning and control technologies.
A variety of complex scenarios, especially corner cases, require higher perception and decision capabilities of autonomous driving. BEV technology enhances the perception of autonomous driving systems by providing a holistic perspective. Transformer models can be used to extract features from multimodal data, such as LiDAR point clouds, images and radar data. The end-to-end training on these data allows Transformer to automatically learn the internal structure and interrelation of these data, so as to effectively recognize and locate obstacles in environments.
BEV+Transformer can build an end-to-end autonomous driving system to achieve high-precision perception, prediction and decision. In SenseTime's case, based on a multimodal foundation model, it can enable data closed loops of prediction and decision. UniAD, SenseTime's perception-decision integrated end-to-end autonomous driving solution, increases the lane line prediction accuracy by 30%, and reduces the errors of motion displacement prediction by nearly 40% and the planning errors by nearly 30%. With regard to AI decision, SenseTime and Shanghai Artificial Intelligence Laboratory launched OpenDILab, a decision AI platform which can also be used in autonomous driving for planning and control.
In addition, JueFX Technology also has the "perception-decision-data" closed-loop capability, and its competitive edge lies in the integration and flywheel effect between algorithms and data. In terms of software, JueFX's core technology path is the fusion of computing power, that is, fuse the spatial data related to the position and attitude of the vehicle, the static data of heavy or light maps, and the sensor perception data, compute them in real time, and apply them to the perception system, positioning system, path planning system or memory mapping system of autonomous driving.
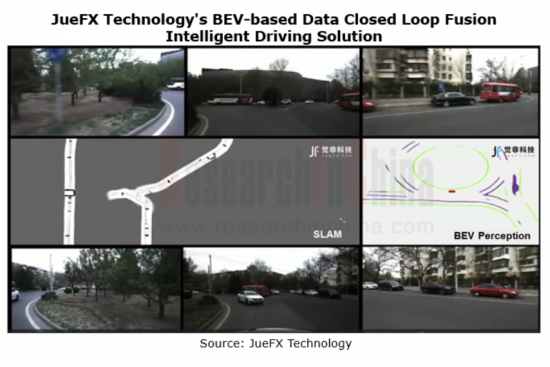
Table of Contents
1 Overview of Autonomous Driving Data Closed Loop
- 1.1 Three Cornerstones for Development of Autonomous Driving Technology
- 1.2 What Is Data Closed Loop
- 1.2.1 Data Collection
- 1.2.1.1 Real Scene Data Collection
- 1.2.1.2 Simulation Scene Data Collection
- 1.2.2 Data Compliance
- 1.2.2.1 Regulatory Requirements for Data Processing Security
- 1.2.2.2 Automotive Data Security Technology and Protection System
- 1.2.3 Automated Data Processing
- 1.2.4 Algorithms
- 1.2.4.1 AD Algorithm Trends
- 1.2.5 Data Annotation and Development
- 1.2.5.1 TOP 10 Autonomous Driving Data Annotation Providers, 2023
- 1.2.5.2 Examples of Automatic Annotation System - DataOcean AI
- 1.2.5.3 Examples of Automatic Annotation System - Tesla
- 1.2.5.4 3D Point Cloud Technology
- 1.2.5.5 3D Point Cloud Image Annotation
- 1.2.5.6 2D/3D Fusion Annotation
- 1.2.5.7 3D Point Cloud Semantic Segmentation Annotation
- 1.2.5.8 3D Point Cloud Continuous Frame Annotation
- 1.2.1 Data Collection
2 Application of Foundation Model in Autonomous Driving Data Closed Loop
- 2.1 Foundation Model Based on Neural Network
- 2.2 Post-fusion, Feature-level Fusion and Pre-fusion
- 2.3 BEV+Transformer Has Become the Mainstream Solution at Present
- 2.3.1 BEV+Transformer Significantly Improves the Feature-level Fusion Effect
- 2.3.2 BEV+Transformer Helps City NOA to Get Rid of Maps
- 2.3.3 Light Map Data Closed Loop Solution Example 1
- 2.3.3 Light Map Data Closed Loop Solution Example 2
- 2.3.4 BEV Is Upgraded to Network Occupation (Vision + Radar) to Be Free from LiDAR
- 2.3.5 Multi-sensor Fusion Route: Necessity of LiDAR
- 2.3.6 Software 2.0 Drives Autonomous Driving Algorithms to Head in the End-to-End Direction
- 2.4 Overview of Foundation Models Enabling Autonomous Driving
- 2.4.1 Foundation Models Facilitate Data Mining and Automatic Annotation
- 2.4.2 Foundation Model + Small Model
- 2.5 Foundation Model Capability Building and Tool Chain
- 2.5.1 Examples of Foundation Model Capability Output - Microsoft
- 2.5.2 Examples of Foundation Model Capability Output - Nvidia
- 2.6 Overview of Foundation Model Layout in Automotive Industry
- 2.7 AI Foundation Model Accelerates Automotive GPT
- 2.8 AI Foundation Model Accelerates Implementation of City NOA
3 Application of Cloud Platform in Autonomous Driving Data Closed Loop
- 3.1 Roles of Cloud Platform in Data Closed Loop (1)
- 3.2 Roles of Cloud Platform in Data Closed Loop (2)
- 3.3 Roles of Cloud Platform in Data Closed Loop (3)
- 3.4 List of Autonomous Driving Cloud Supercomputing Centers in China
- 3.5 Typical: AWS Cloud Platform Data Closed Loop
- 3.6 Typical: Volcengine Data Closed Loop Cloud Service Platform
- 3.7 Typical: Alibaba Cloud Data Closed Loop
4 Typical Simulation Companies in Autonomous Driving Data Closed Loop
- 4.1 The International Organization for the Standardization of Autonomous Driving Simulation
- 4.2 The Localization of ASAM Standards in China
- 4.3 Domains of ASAM Standards
- 4.4 Foreign Vehicle Dynamics Benchmarking Companies
- 4.5 Foreign Traffic Scene Simulation Benchmarking Companies
- 4.6 Foreign Virtual Scene Simulation Benchmarking Companies
- 4.7 Foreign Sensor Simulation Benchmarking Companies
- 4.8 Foreign Hardware-in-the-Loop Simulation Benchmarking Companies
- 4.9 Dynamics of Autonomous Driving Simulation Platforms in China
- 4.10 Typical Company: IAE
- 4.10.1 Profile
- 4.10.2 X-IN-LOOP® Simulation Test Technology System
- 4.10.3 Vision
- 4.11 Typical Company: PanoSim
- 4.11.1 Profile
- 4.11.2 Autonomous Driving Simulation Test Platform
- 4.11.2 Product Composition and Function
- 4.11.2 Products and Features
- 4.11.3 Application Scenarios of xPilot
- 4.12 Typical Company: 51WORLD
- 4.12.1 Profile
- 4.12.2 Simulation Platform 51Sim-One
- 4.12.3 Simulation Platform 51Sim-One: Cloud Simulation
- 4.13 Typical Company: Cognata
- 4.13.1 Profile
- 4.13.2 Overview of Autonomous Driving Simulation
- 4.14 Typical Company: VI-grade
- 4.14.1 Profile
- 4.14.2 Simulator Series
- 4.14.3 AutoHawk Platform
- 4.14.4 Simulator Third-party Software Tools/Interfaces
- 4.14.5 Customers
- 4.14.5.1 Customer Cases
5 Data Closed Loop Layout of Typical OEMs
- 5.1 BYD
- 5.1.1 Data Closed Loop System Construction
- 5.1.2 Big Data Accumulation
- 5.1.3 Data-driven Foundation Model R&D Route
- 5.1.4 R&D of Data-driven Perception Model
- 5.1.5 Multi-camera BEV Object Perception Model
- 5.1.6 Transformer-based Multi-sensor Multi-task Fusion Perception
- 5.1.7 Truth-value System Based on Foundation Model
- 5.1.8 Vehicle Computing Platform
- 5.1.9 R&D of Decision and Planning Foundation Models
- 5.2 SAIC
- 5.2.1 SAIC's "157X" Technology Innovation System
- 5.2.2 SAIC's Data Closed Loop Solution
- 5.2.3 Z-ONE Galaxy Intelligent Driving Full-stack Solution
- 5.2.4 Z-ONE Galaxy Intelligent Driving Computing Platform
- 5.2.5 Z-ONE Galaxy Intelligent Driving Computing Platform - Cloud-Pipe-Terminal Data Closed Loop
- 5.2.6 Rising Auto/IM Motors - PP-CEM Intelligent Driving System
- 5.2.7 Rising Auto/IM Motors - Autonomous Driving Data Closed Loop
- 5.2.8 Rising Auto/IM Motors - Autonomous Driving Data Mining & Processing
- 5.2.9 Rising Auto's Fully Integrated Advanced Intelligent Driving System
- 5.2.10 IM Motors' D.L.P. Artificial Intelligence Model
- 5.2.11 NOA Performance of IM Motors
- 5.3 Changan Automobile
- 5.3.1 New Technology Architecture
- 5.3.2 New Technology Architecture - Cloud Platform
- 5.3.3 New Technology Architecture - Data Closed Loop
- 5.4 Geely
- 5.4.1 Xingrui Intelligent Computing Center
- 5.4.2 Intelligent Driving Cloud Data Factory
- 5.4.3 Intelligent Driving Closed Loop System
- 5.4.4 ROBO Galaxy Toolchain Process Solution
- 5.4.5 Data Production Modes
- 5.4.6 Underlying Software Abstraction of Self-developed Algorithms
- 5.4.7 Intelligent driving Design Based on Self-developed SOA
- 5.4.8 Fully Self-developed Cockpit Operating System
- 5.4.9 Global Platform Operation System
- 5.5 Xpeng
- 5.5.1 Fuyao Intelligent Computing Center
- 5.5.2 XNet Deep Visual Neural Network
- 5.5.3 All-scenario Intelligent Driving Assistance System - XNGP
- 5.5.4 Closed Loop Data Iteration System of XNGP
- 5.5.5 SEPA2.0 Fuyao Architecture
- 5.6 Li Auto
- 5.6.1 Progress in Intelligent Computing Center
- 5.6.2 AD MAX3.0 Algorithm Training
- 5.6.3 Vehicle Model Planning
- 5.7 Tesla
- 5.7.1 Progress in Dojo Supercomputer Platform
- 5.7.2 Autonomous Driving Data Closed Loop System
- 5.7.3 Data Engine Data Center
- 5.7.4 Data Annotation
- 5.7.5 Iteration History of Autonomous Driving Algorithms
- 5.7.6 Intelligent Driving AP/EAP/FSD
- 5.7.7 4D Radar
6 Data Closed Loop Layout of Typical Autonomous Driving Providers
- 6.1 Baidu
- 6.1.1 Autonomous Driving Data Closed Loop Solution
- 6.1.2 Road Data Collection Service
- 6.1.3 Autonomous Driving Data Processing Compliance Service
- 6.1.4 Data Annotation Service
- 6.1.5 Intelligent Driving Data Management Platform
- 6.1.6 Simulation Test Service
- 6.1.7 Autonomous Driving Toolchain
- 6.1.8 ERNIE Bot Foundation Model
- 6.2 Huawei
- 6.2.1 "1+3+M+N" Solution
- 6.2.2 Huawei Cloud ModelArts Platform
- 6.2.3 "Octopus" Platform
- 6.2.4 ADS 2.0 Algorithm
- 6.2.5 Progress in ADS 2.0
- 6.2.6 Released the "Cloud-Edge-Terminal" Automatic Data Closed Loop System
- 6.2.7 Huawei Cloud Empowers Automakers
- 6.3 Freetech
- 6.3.1 ODIN Digital Intelligence Base
- 6.3.2 Data Closed Loop System
- 6.3.3 Autonomous Driving Software Platform - FAS
- 6.3.4 Development Route of Advanced Autonomous Driving Solutions
- 6.3.5 Advanced Domain Controller Solution
- 6.3.6 Upgraded Data Storage Platform
- 6.4 MAXIEYE
- 6.4.1 Profile and Development History
- 6.4.2 MonoToGo Solution
- 6.4.3 Data Closed Loop System
- 6.4.4 MAXIPILOT® Intelligent Driving Platform Solution
- 6.4.5 MAXIPILOT® 1.0/2.0/3.0
- 6.4.6 Major Customers and Partners
- 6.5 Nullmax
- 6.5.1 Profile and Development History
- 6.5.2 Self-developed Full-stack Autonomous Driving Brain - Max
- 6.5.3 Data Closed Loop
- 6.5.4 BEV-AI Architecture
- 6.5.5 BEV 3D Object Detection Algorithm
- 6.5.6 Driving-parking Integrated Solution - MaxDrive
- 6.5.7 Driving-parking Integrated Low-compute Platform Solution 4.0
- 6.5.8 Driving-parking Integrated Mid-to-high-compute Platform Solution 4.0
- 6.5.9 Partners
- 6.6 Pony.ai
- 6.6.1 Progress in Unmanned Autonomous Driving
- 6.6.2 Passenger Car Intelligent Driving Business
- 6.6.3 Intelligent Driving Solution - Shitu
- 6.6.4 Shitu's New Planning and Control Algorithm Architecture - NLPP
- 6.6.5 Self-developed Domain Controller - Fangzai
- 6.6.6 Data Closed Loop Toolchain - Cangqiong
- 6.7 Momenta
- 6.7.1 Profile
- 6.7.2 Core Technologies
- 6.7.3 Autonomous Driving Solutions
- 6.7.4 Data Closed Loop Automation
- 6.7.5 "Mapless" Intelligent Driving Algorithm Solution
- 6.7.6 Mpilot Pro Medium-configured Solution for Mass Production
- 6.7.7 Software-hardware Integration Layout
- 6.7.8 Partners
7 Typical Data Closed Loop Solution Providers
- 7.1 Haomo.ai
- 7.1.1 Progress
- 7.1.2 MANA OASIS
- 7.1.3 MANA OASIS Upgrade
- 7.1.4 Introduction to DriveGPT
- 7.1.5 DriveGPT Training
- 7.1.6 HPilot 3.0 & City NOH
- 7.1.7 Ecosystem Partners
- 7.2 SenseTime
- 7.2.1 SenseAuto - Cockpit-driving-cloud System
- 7.2.2 SenseAuto - Data Closed Loop Capability
- 7.2.3 SenseAuto - Perception-decision Integration
- 7.2.4 Foundation Model R&D Capabilities
- 7.2.5 SenseNova Foundation Model System
- 7.2.6 General Foundation Model - "INTERN 2.5"
- 7.2.7 Data Filtering Engine
- 7.2.8 Automatic Annotation of Ultra Large Models
- 7.2.9 Production Process of Vehicle Small Models
- 7.3 EXCEEDDATA
- 7.3.1 Profile
- 7.3.2 Data Base
- 7.3.3 Full-stack Data-driven Capabilities
- 7.3.4 Vehicle-cloud Data Driven Panorama
- 7.3.5 Vehicle-cloud Isomorphic Computing
- 7.3.6 Intelligent Driving Data Collection Tool
- 7.3.7 Intelligent Driving Data Transmission
- 7.3.8 Shadow Mode Solution
- 7.4 LiangDao Intelligence
- 7.4.1 Profile
- 7.4.2 Development History
- 7.4.3 Products and Services (1)
- 7.4.4 Products and Services (2)
- 7.4.5 Smart City Solutions
- 7.4.6 Data Closed Loop
- 7.4.7 Data Factory Solution
- 7.4.8 Data Collection Service Co-developed with ZhongOu Intelligent Technology
- 7.4.9 Partners
- 7.5 JueFX Technology
- 7.5.1 "Perception-Decision-Data" Closed Loop Capability
- 7.5.2 Perception Foundation Model Algorithm Architecture
- 7.5.3 High-precision Fusion Positioning Architecture
- 7.5.4 City NOA Intelligent Driving Solution
- 7.5.5 Highway NOA Map & Positioning Solution for Mass Production
- 7.5.6 Dynamics in Cooperation
- 7.6 Rhino
- 7.6.1 Profile
- 7.6.2 Data Closed Loop System
- 7.7 Horizon Robotics
- 7.7.1 Journey 2/3/5
- 7.7.2 Highlights of Journey® 5
- 7.7.3 BEV Time-space Fusion Architecture on Journey® 5
- 7.7.4 BPU Intelligent Computing Architecture
- 7.7.5 Intelligent Computing Development Tools
- 7.7.6 AIDI® Development Cloud Infrastructure
- 7.7.7 Ecosystem Cooperation
- 7.8 Black Sesame Technologies
- 7.8.1 Data Closed Loop Solution
- 7.8.2 BEV Framework
- 7.8.3 Data Collection System
- 7.8.4 Automatic Annotation of 3D Data
- 7.8.5 Latest Cooperation Cases
- 7.9 Kunyi Electronics
- 7.9.1 Profile
- 7.9.2 Products and Solutions
- 7.9.3 Autonomous Driving Data Processing Workstation
- 7.9.3 Remote Data Collection Recording and Analysis Solution
- 7.9.4 Intelligent Driving Data Reinjection System
- 7.9.4 Road Collection and Reinjection Function
- 7.9.5 Hardware-in-the-loop (HIL) Test System
- 7.9.6 VGATE Series Vehicle Bus Recorder
- 7.9.7 Automotive Ethernet Module
- 7.9.8 Controller Analysis and Calibration Software - VCAR MCD
- 7.9.8 Bus Simulation Analysis Software - VCAR DAS
- 7.9.9 Distribution of Customers
